宇树机器人行动力再进化 征服复杂地形
2025-02-20 来源:pengjian
2月19日,上海AI实验室、上海交通大学、浙江大学、香港大学、香港中文大学联合发布了一项新成果——BeamDojo强化学习框架。该框架能够使人形机器人在稀疏立足点地形上实现敏捷且稳健的移动,在模拟和现实实验中展现出高效学习与精准足部定位的能力。
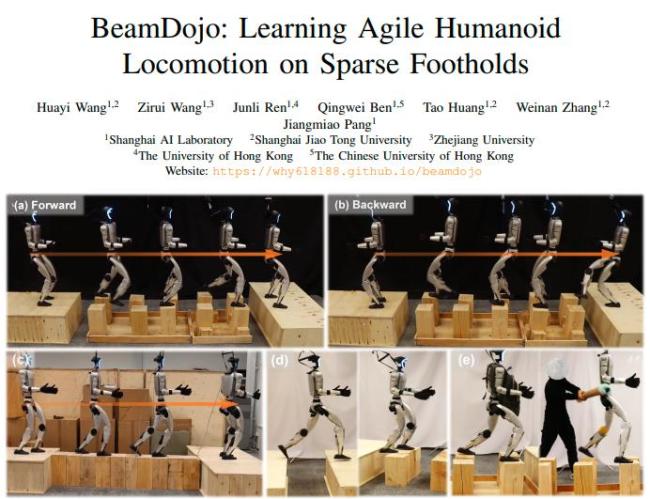
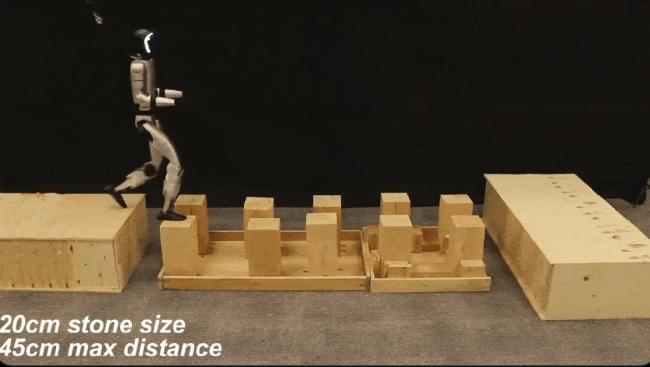
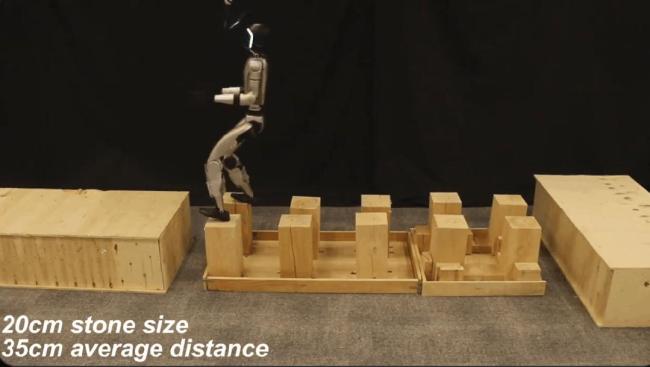
在这个框架下,宇树旗下人形机器人G1可以克服更多危险地形,如平衡木、梅花桩等,并能在宽度仅约20厘米、间距不一的踏脚石上稳定行走。即使在背负6千克重物或遭受外力干扰的情况下,G1也能成功完成任务。此外,G1还能倒着行走。
BeamDojo框架的主要创新点包括两阶段强化学习训练策略,提高机器人学习效率;为多边形脚掌量身定制的基于采样的落脚点奖励机制;以及搭载基于激光雷达的高程地图系统,以实现实时地形感知。通过这些技术,G1展现了零样本泛化能力,尽管在训练过程中并未接触过稀疏地形与平衡木,但其在各类稀疏落脚点地形上的成功率高达80%。
日前,宇树科技发布了G1机器人的多段行走视频,展示了跳舞、遛机器人狗、逛街等场景。流畅的舞姿得益于算法升级,宇树科技表示,G1可以学习任意舞蹈。
相关推荐:
 2025-03-12
2025-03-12 2025-03-12
2025-03-12 2025-03-12
2025-03-12


